5-Axis Non-Planar 3D Printer
A team-built 5-axis FDM printer that adds two rotational axes to a Cartesian platform so the nozzle can stay aligned with curved surfaces during non-planar printing. I owned the B-axis: the full-bed 360° rotation subsystem, from SolidWorks design and gear and slip-ring selection through machining and calibration.
Role: B-axis (full-bed rotation) subsystem owner
Organization: Carnegie Mellon University (Pittsburgh, PA)
Timeline: Sep 2025 – Dec 2025
· SolidWorks · CAD · Mechatronics · Machining (lathe, laser cut, water-jet) · Calibration
Project demonstration of the assembled 5-axis printer running non-planar prints.
What I Built
Owned the B-axis, the full-bed 360° rotation subsystem, and designed it in SolidWorks: bed structure, NEMA-17 motor mount, shaft and bearing supports, and the gear transmission.
Chose a 5:1 spur-gear ratio over 4:1 to cut backlash and improve rotational accuracy.
Used a concentric slip-ring so the bed could rotate continuously through 360° without straining the heated-bed and sensor wiring.
Machined and assembled the parts myself on the lathe, water-jet, and laser cutter (acrylic and aluminum plates), then handled tolerancing, wiring, and rotary-axis homing and calibration.
Results
The B-axis delivered stable, continuous 360° bed rotation, and the assembled printer demonstrated coordinated five-axis non-planar printing.
Shown live at two CMU exhibitions, where the project won Best Overall Project (MechE Expo) and Best Innovative Project (TechSpark Expo).
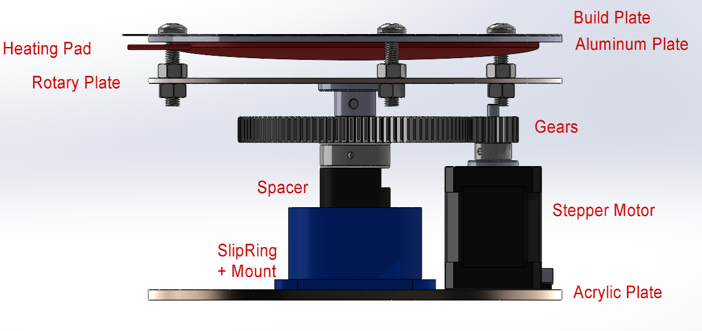
The B-axis subsystem I designed: a slip-ring-coupled rotary bed with a 5:1 spur-gear drive for continuous 360° rotation.
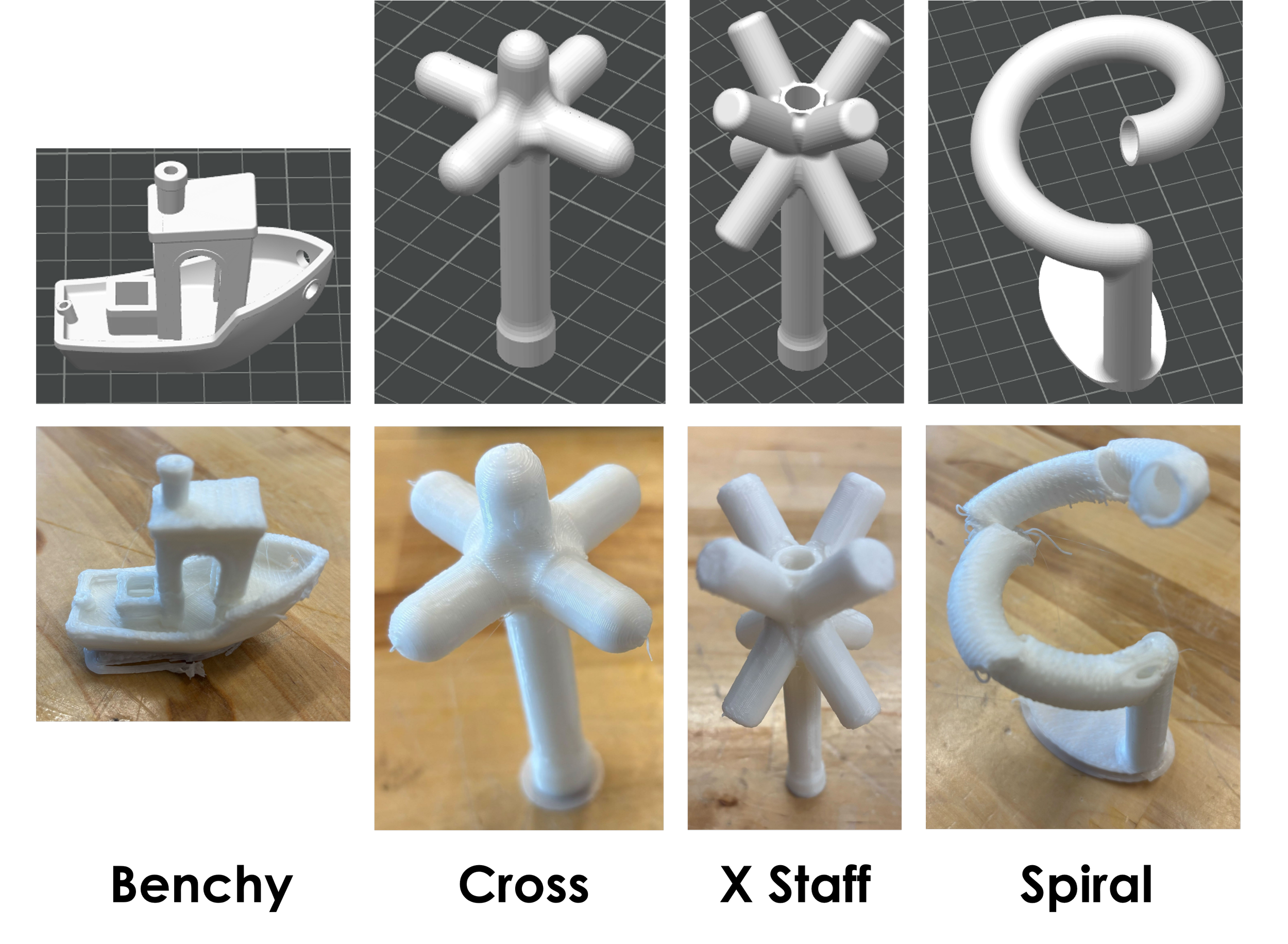
Non-planar test prints from the assembled printer: slicer preview against the printed part.
System Overview
Standard FDM printers only deposit flat layers, which weakens curved parts and adds support material. Adding rotational axes lets the nozzle stay aligned with curved surfaces for non-planar printing. This team project extended a Cartesian FDM printer with two rotational axes: an A-axis for bed tilt and a B-axis for full-bed rotation. I owned the B-axis. Teammates handled the A-axis, the slicer and firmware, and the combined electronics.
Key Technical Decisions
5:1 gear ratio over 4:1 for the bed drive. The higher reduction traded some rotation speed for less backlash and finer angular resolution, which matters more than speed for print accuracy.
A concentric slip-ring for continuous rotation. The slip-ring let the bed spin through unlimited 360° rotation without twisting or fatiguing the heated-bed and sensor cabling that a fixed harness would have snagged.
Learnings & Limitations
3D-printed PLA gears introduced backlash that limited rotational precision, which pointed toward metal gears or a higher-quality transmission for a next version.
PLA gear deformation and belt-tension loss over long prints hurt repeatability during sustained motion.
Non-planar toolpath quality was limited by the open-source slicer the team adapted, which wasn't built for multi-axis paths.